QuadLN_S Version 3 Firmware
QuadLN_S Version 3.4 Update Package
Current production QuadLN_S Version 3.4 firmware including user manual. Version 3 has the most recently added features including support for up to 16 servos or stall motors, servo refresh, aspect-controlled turnouts, oscillate mode, center-align, etc. See the included ReadMe file for more info.
JMRI 5.10 or later is required to access the new features in firmware version 3.4. JMRI 5.8 supports all QuadLN_S firmware features though firmware version 3.3. Do not attempt to install firmware version 3.4 unless you are running JMRI 5.8 or later.
QuadLN_S Version 3.5 Update Package
The QuadLN_S Version 3.5 beta firmware package, including jmri template files and updated manual, is available upon request. Version 3.5 adds support for two types of semaphore special effects. Contact us if interested.
Prior QuadLN_S Version 2 Firmware
QuadLN_S Version 2.0.7 Update Package
QuadLN_S Version 2.0.7 firmware including manuals covering V2 features for all QuadLN_S family products. See the included ReadMe file for more info. This firmware is provided only for the convenience of users who wish to downgrade a new QuadLN_S or reinstall firmware in an existing board that was running Version 2. Ungrading to Version 3 instead is the recommended approach.
Manuals
QuadLN_S Manual Version 3.4 Firmware
QuadLN_S Manual Version 3.3 Firmware
QuadLN_S Getting Started v3.3 Firmware
QuadLN_S Manual Version 3.2 Firmware
QuadLN_S Getting Started v3.2 Firmware
QuadLN_S Manual Version 2 Firmware
Remote Align Board Quick Start
Instruction Sheets
Pushbutton with LED Ring Light
Signal Connector Interface Board
Linear Switch Machine Throw Wire Changeout
Railsync Power and Termination
Mounting Drawings
QuadLN_S Mounting Drawings (c) 2025 N3IX Engineering
Dimensioned mounting drawings for the QuadLN_S and all add-on boards. The zip file includes 1:1 scale drawings for Letter and A4 size paper in both English and Metric units.
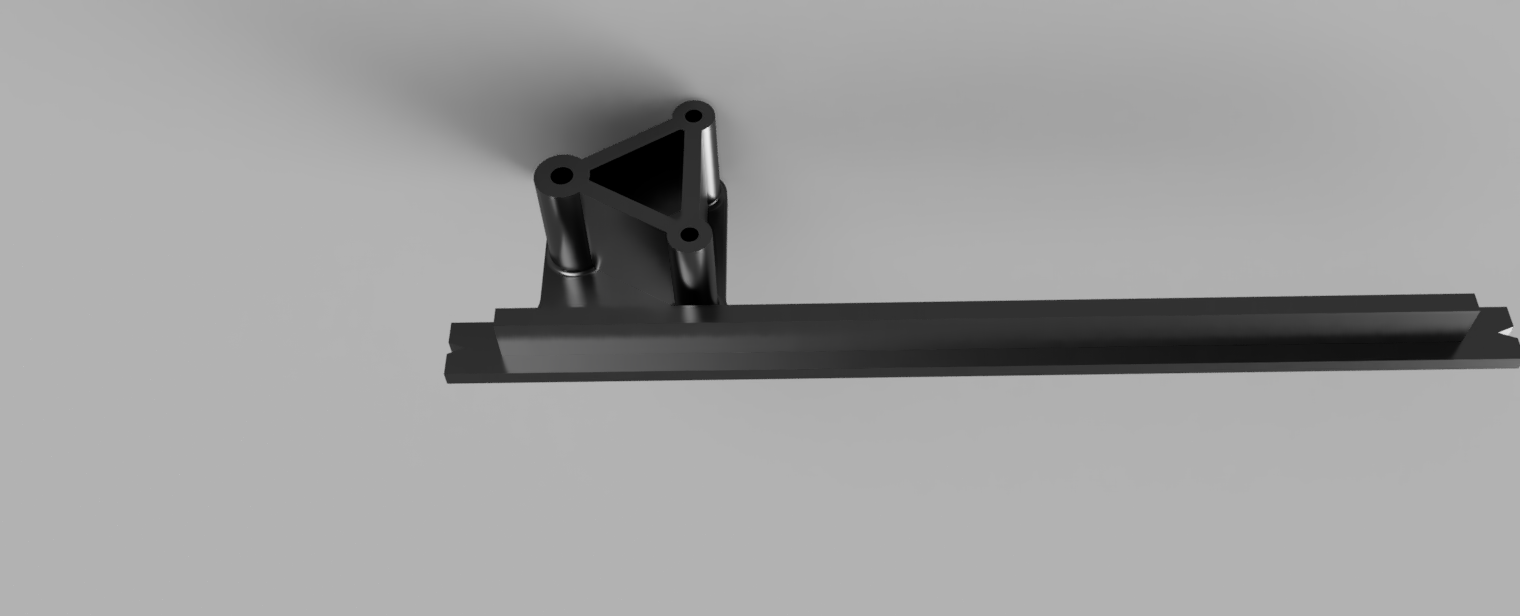
Diamond Fascia Controller Mounting Drawing (c) 2026 N3IX Engineering
Dimensioned mounting drawing for the Diamond-shaped 3DP Fascia Controller.
Mounting Plate
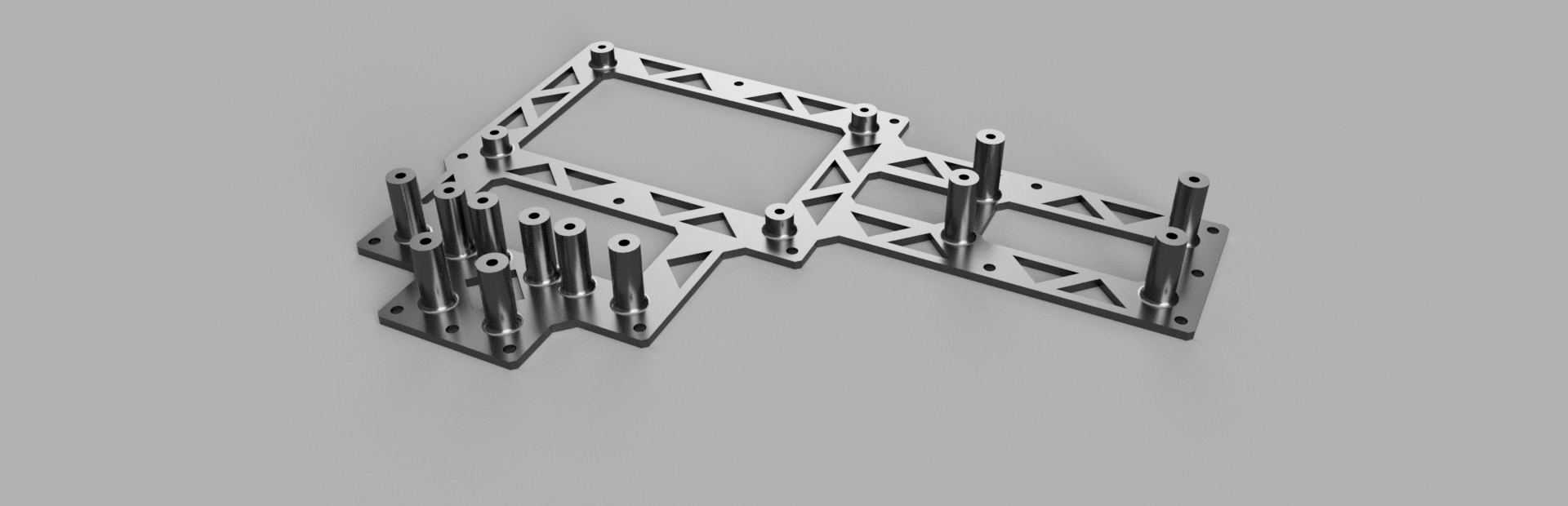
QuadLN_S Mounting Plate stl file (c) 2022 N3IX Engineering
A QuadLN_S mounting plate design for 3D printing. The mounting plate has built-in standoffs for a QuadLN_S and any combination of Detector, Signaling and Driver add-on boards. Use 1/4″ or 3/8″ long #4 self-tapping screws to secure the boards to the mounting plate, then attach the mounting plate to a flat surface using appropriate length #4 screws as required.
I typically print the mounting plates using PLA with 25% infill. Printing takes about 3 hours on my Vyper. The board mounting hole size has been tweaked to make it easy for me to start #4 screws without pre-drilling. Depending on your printer and filament you may need to clean out the holes using a 3/16″ or 7/32″ bit, or alternatively use a small amount of “Hole Horizontal Expansion” in your slicer, to make threading the screws easier and lessen the risk of breaking a standoff.
If you aren’t installing a Driver Board in the AUX IO Port, you can just snip off the standoff closest to the Remote Align Connector to make access to the connector easier.
QuadLN_S Mounting Plate for TVD boards stl file (c) 2022 N3IX Engineering
The QuadLN_S mounting plate design as above, but adjusted for the board sizes and hole locations of the legacy QuadLN_S, Signal and Detector boards that were produced by Tam Valley Depot.
Linear Switch Machine Installation Aides
3-D Printed N Scale Atlas Code 55 Drill Guides and more
Installation Aides you can print for use with the Linear Switch Machines and Atlas Code 55 N Scale Turnouts. To download the printer files click the link to go to my layout 3D Printing page.
Tips and App Notes
Yard Track Selection Via Single Button Press For 6 Track Yard
Guide to configuring the Cascade feature for easy alignment of a 6 track yard ladder to the desired yard body track via a single button press. Also covers setting up LED indicators to display the currently selected yard body track. All done using just one QuadLN_S.
Yard Track Selection Via Single Button Press For 10 Track Yard
Guide to configuring the Cascade feature for easy alignment of a 10 track yard ladder to the desired yard body track via a single button press. Also covers setting up LED indicators to display the currently selected yard body track. Uses 2 QuadLN_S boards (some of the second board is available for other uses) plus a Signal Board.
Yard Track Selection Via Single Button Press For 6 Track Yard with Runaround and Crossover
Guide to configuring a QuadLN_S for easy alignment of a 6 track yard ladder to the desired yard body track via a single button press. Runaround track selection and Crossover alignment is included. Also covers setting up LED indicators to display the currently selected yard body track. All done using just one QuadLN_S
Example JMRI Jython Script to Interrogate QuadLN_S boards one at a time
At startup JMRI attempts to determine the state of all LocoNet Turnouts and Sensors using a process called Stationary Interrogation. On large layouts many LocoNet devices may respond to each Interrogation message, resulting in message collisions, long delays and possible lost information. QuadLN_S firmware version 3.1.4 and later can be configured to support direct interrogation, where only one QuadLN_S board responds to each status request. This approach provides for reliable initialization on large layouts. The sample script individually interrogates all QuadLN_S boards in the roster between a specified starting board address and a specified ending board address.
DigiKeijs DR5000 settings for reliable LocoNet communication
Settings that users have found improves the DR5000 communications with the QuadLN_S and other LocoNet devices.
User Support Groups
Tam-Valley-Products@groups.io is the forum for QuadLN_S questions and discussion.
jmriusers@groups.io is the place for all things JMRI.