The QuadLN_S LocoNet® Servo Decoder handles servo control, inputs, outputs and LocoNet® communications. Provides complete turnout control of up to 16 compact SG90 servos. Supports stall motors via optional Driver boards. Optional add-on boards for Detection and Signaling. Fully configurable using JMRI. Operates on a conventional LocoNet® with a command station or on a standalone LocoNet® that has no command station. Firmware can be updated using JMRI. Includes mounting screws and standoffs.
QuadLN_S LocoNet Servo Board Features
- Operate turnouts from your control panel, throttle, or JMRI.
- Handles 8 Servos + 8 configurable input/outputs
- Supports up to 16 Servos per board with version 3 firmware.
- Each input/output can be both an external input and a servo position indicator output at the same time.
- Use pushbuttons, toggle switches or external logic from other boards as inputs.
- 2-position (turnout) and 3-position (semaphore, 3-way stub) servo control.
- Local inputs can be locked out via (key)switch or Loconet command. Perfect for continuous running during open houses.
- Turnout Position feedback reporting over Loconet
®to confirm commands are received and acted upon. - Cascade feature allows aligning an entire yard ladder by throwing just one turnout.
- 8 Programmable routes for triggering Turnouts, Sensors and Signals.
- Locally adjust servo parameters using the Remote Align board or set them via JMRI. Remote Align board can also adjust Detector sensitivity and Signal LED brightness.
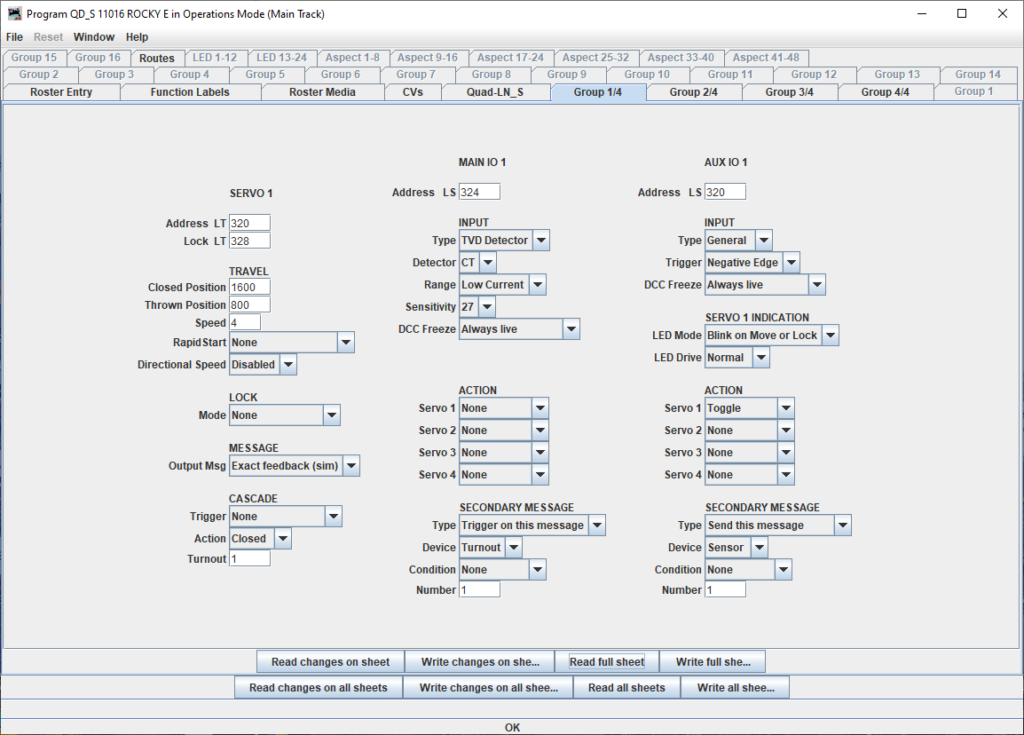
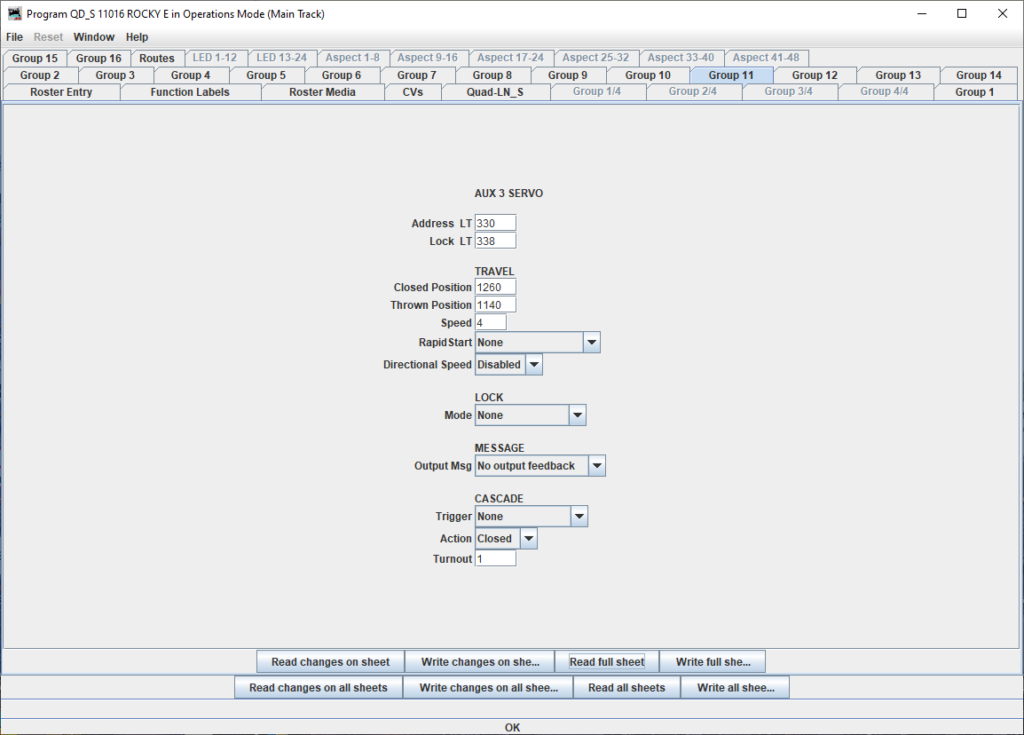
- Easily configured using JMRI.
- Separate Closed and Thrown speed settings for animation of features like a pile driver – slow going up but fast going down.
- Oscillate mode for easy animation of features like pump heads or wig-wag signal arms.
- Detector Board add-on for 4 channels of current detection with individual sensitivity adjustments.
- Signal Board add-on for 24 LED outputs with realistic effects.
- Field upgradeable firmware (requires Remote Align board and JMRI).
- So much more – download the QuadLN_S manual plus the Signal Board and Detector Board manuals for all the information (see below).
QuadLN_S LocoNet Servo Board Is Not Just For Servos!
QuadLN_S LocoNet Servo Board Is Not Just For Turnouts!
Firmware Updates and Manuals
See the Downloads page for the latest firmware and manuals.
User Support Groups
Tam-Valley-Products@groups.io is the forum for QuadLN_S questions and discussion.
jmriusers@groups.io is the place for all things JMRI.